| FORK reb zeta explained |
- Rebound damping controls the return of the wheel after bump impact.
- The oscillation response can be calculated by two fundamental parameters, tau and zeta. Those two parameters are simple functions of mass, spring rate and damping.
- A calculation using the mass of the bike, spring rate, leverage ratio and rebound damping force give us a value for 'zeta'.
- This 'r-zeta' number is used to analyze and compare rebound response of the forks and shock. Because the formula takes into account front and rear leverage ratios, it allows comparisons between different bikes.
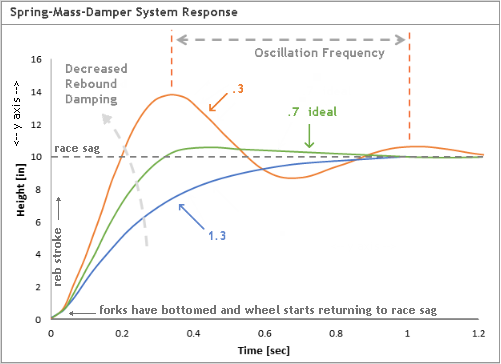
- The chart below shows three r-zeta values for slow, medium and fast fork rebound.
- Picture the bike sitting on the stand with 12 inches of available fork travel.
- On the graph below, the 12 inch travel is the y-axis.
- Topped out is 12, bottomed is 0 (zero).
- The 10 inch height represents 2" of fork sag. For arguments sake, this is where bump impact begins and ends. The goal is for the front wheel to absorb the bump impact and return to race sag without packing or extensive overshooting.
- r-zeta = .3 is too fast and would baby buggy, the wheel overshoots race sag, when it settles back it undershoots and then overshoots again.
- r-zeta = .70 could be considered ideal, the wheel slightly overshoots race sag, which helps keep the front end up, then settles down without any baby buggy motion.
- The .70 ideal r-zeta value is the same for both the forks and shock.
- Note that .70 is ideal on paper. Depending on the application, r-zeta can range from .50 - .90
- r-zeta = 1.3 is too stiff and packs, the wheel does not make it back to the race sag starting position before hitting the next bump.
- [short animation r-zeta .3]
- [short animation r-zeta .7]
- r-zeta is very powerful and gives a good indication of where the rebound is at.
- After comparing a handful of tests it's easy to determine a decent baseline zeta value for your application.
|
 |